Last Updated on June 12, 2024 by MASSAGE Magazine
Recently, a student asked me why the hamstrings are synergist to the hip flexors. I suggested that they draw their knee to their chest.
By doing so, they experienced the action of the knee: flexion.
The role of the hamstring is to assist in pelvic stability, knee flexion and knee stability. The action that muscles participate in often is not limited to one function. Muscles respond to movement in a three-dimensional context.
Our structure organizes in specific ways when we are engaged in movement.
Over the years, different terms have been used to describe how muscles activate to accomplish movement.
Slings, force transmission, force coupler, neuromuscular sequencing and kinetic chains are common terms we hear. Kinetic chains is currently in vogue, so let’s use that to discuss optimal organizational patterns of the body.
The Body’s Elegant Symphony
We must consider that muscles do not work in isolation. Muscles work in partnership to create movement.
Bones, joints, ligaments, periosteum, tendons, muscles, fascia and skin are all working in an elegant symphony during movement. The structure organizes synergistically so that movement is optimal and efficient.
Usually, we don’t have to think about movement.
The nervous system is automatically adapting and responding to the movement environment. Surprisingly, at least 70 percent of the sensory neural inputs are not registering cognitively during movement.
For example, when we walk, we don’t have to think about the complexity of the contralateral coordination patterns that are occurring during the gait. The mechanoreceptors in the body’s ligaments are instructing, through load feedback, which muscles to activate and which muscles to inhibit.
Ligament neural input is not part of the conscious kinesthetic awareness field created by proprioception. We only become aware of the ligament neural input when that ligament is stressed or strained, and through nociception we get the signal that relays there is an issue.
Our nervous system is also “prewired” with reflexive movement patterns that inform and affect movement.
For example, developmental movement is in place as a survival mechanism. We then must grow out of the vulnerability of being an infant, learn to walk and run so that we can evade predators.
Even though we live in a digital age, our nervous system is still hard wired to survive the Stone Age. The very first reflex, even before the first breath, is the push reflex. We need leg drive to push out of our mother’s womb; then we are poised to take our first breath.
Leg Drive and the Kinetic Chain
Leg drive is a primary motor function. As biped upright mammals, we stand on Earth, which spins creating gravity. Gravity is a constant force to which we adapt.
Leg drive, the ability to press into the earth, is the counter action to the force of gravity. This is an expression of Newton’s law: “For every action there is an equal reaction.”
Leg drive has some interesting qualities in the kinetic chain. The energy zig-zags through the structure. With each zig, the complementary zag balances the energy into an upright axis
Let’s take a look at how this applies to the walking gait through strike, stance, push and swing.
Strike is the initial ground engagement. The energy from the subsequent swing is compounded by gravity at the moment of impact.
The energy from heel strike moves up the fibula, through the posterior thigh, into the sacrotubrous ligament, across the SIJ and up the contralateral erector spinae to the cranium. As the energy is dispersed joint by joint, that energy is translated into the next phase of the gait, stance.
The stance phase of the gait takes the energy of ground engagement and turns it into ground force reaction. Here we see Newton’s law at play.
The appropriate response to kinetic energy is to equalize with push into the earth through leg drive. The stance phase is a dynamic single leg balance. The walking gait in essence is the transition of balance from one leg to the next.
Balance on one leg requires frontal plane stability. Pelvic stability in the frontal plane is an interplay between the lateral hip, the adductors, and the contralateral hip/torso stabilizer, the quadratus lumborum.
This lateral zig-zag creates a triangle. In mechanics, the triangle is one of the more stable structures. Next time you drive over a bridge notice how many different triangles make up the girders of support. In the human body, these triangles are dynamic and responsive to a changing movement environment.
Balancing on one leg also requires transverse plane stability. An upright axis of the spine has rotation and complementary counter rotation.
Just as the spine in sagittal plane has complementary curves, so too does the rotary component of the walking gait. While in stance, the contralateral lumbar pelvis is moving forward
On the posted leg side, the lumbar pelvis is moving back. The torso is rotating to the mobile contralateral side and the cervicals are counter rotating back to the posted leg so that the cranium is oriented to the forward direction of movement.
The rotation and counter-rotation of the axial skeleton creates a dynamic platform for the power generation of the next phase of gait, push.
Up to this point, leg drive has been actively responding to the kinetic energy of ground engagement—ground force reaction. In the push phase of the gait, leg drive becomes the active element that initiates forward motion.
The push phase of the gait uses the transverse plane to create torsion. This in turn generates stored elastic energy.
As the posterior hip coils into the thoracolumbar fascia, the opposite shoulder is coiling as well. The stored elastic energy coiled into the thoracolumbar fascia can only be realized as forward motion through leg drive. We push backward to move forward.
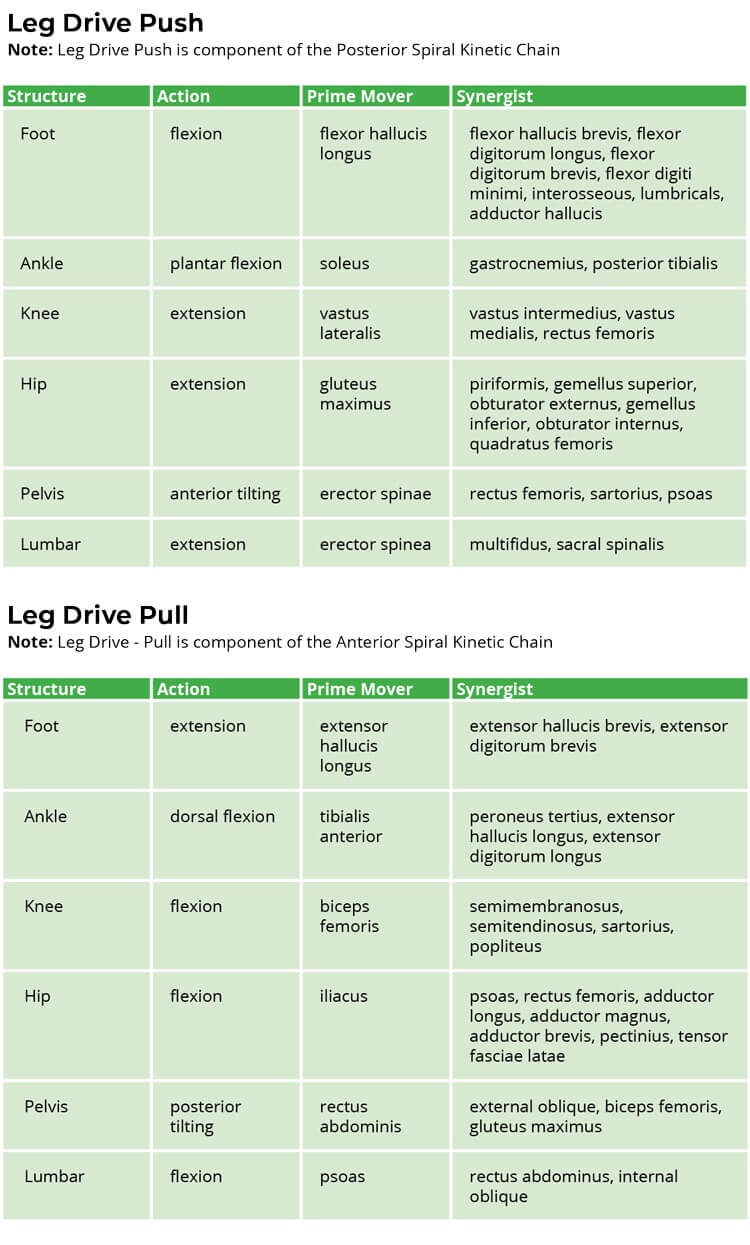
The action of pushing into the earth starts where the kinetic chain is closed, at the forefoot. The action of plantar flexion involves the intrinsic muscles of the foot and the posterior leg muscles that act on the ankle.
Plantar flexion is coupled with knee extension. The quadriceps act on the patella creating knee extension.
As we move up the kinetic chain into hip extension, the posterior-anterior-posterior zig-zag becomes more apparent. This alternating activation of tissues starts in the posterior compartment of the foot/ankle/leg, moves to the anterior compartment of the thigh, and then moves back to the posterior compartment of the hip.
The push phase of the gait is self-limiting. Meaning, once the hip, knee and ankle are extended, there is no more range of movement available. Storage of elastic energy is at its potential and now the next stage of forward motion can be realized, the swing phase.
Leg drive, has two complementary aspects, the push and the pull. The swing phase of the gait utilizes the opposite action of leg drive than the push phase.
The functional opposite of pushing is pulling. The swing phase employs leg pull.
Leg pull starts with pulling the forefoot off the ground, followed by knee flexion and then hip flexion. Here, the anterior compartment of the leg is coupled with the posterior thigh, which in turn is coupled with the hip flexors.
Kinetic Chain Integration
The synergistic relationship of the knee flexors and the hip flexors becomes more apparent when the context of kinetic chain integration is explored.
It is important to understand how kinetic chains interface with movement.
When working with your clients, their intake and the story they tell reveals the initial clues as to their presentation. The picture becomes more complete by the information you get from the tension patterns you are feeling with your hands.
Often, it is not so much as releasing the overworked tissues, as it is discovering what performers in the kinetic chain are underworked and not participating.
It is those performers not engaged that are the source of tension for the overworked performers.
Kinetic chain charts can be an invaluable resource when sleuthing the tension patterns of your clients.
About the Author
 Founder of Movement Mantra, Joseph Schwartz, LMT, is the developer of The 5 Primary Kinetic Chains Poster Set and Desktop Edition, Applied Anatomy Blog, and The Spiral Engine of Locomotion™. Joseph’s exploration in the field of somatics has led him on a 30-plus-year journey of finding joy being in the body.
Founder of Movement Mantra, Joseph Schwartz, LMT, is the developer of The 5 Primary Kinetic Chains Poster Set and Desktop Edition, Applied Anatomy Blog, and The Spiral Engine of Locomotion™. Joseph’s exploration in the field of somatics has led him on a 30-plus-year journey of finding joy being in the body.